Physics-informed learning on an oscillator
Same PDE, classical versus quantum-informed ansatz
The Problem
Industrial setting
Many regulated systems are specified by differential equations (dynamics, heat, small-signal circuits, reduced-order surrogates of larger FEM models). You rarely have dense labels everywhere in time; you do have trusted equations and a few trustworthy boundary or trajectory measurements.
A physics-informed neural network (PINN) adds a term to the training objective so the learned function does not only interpolate tabular data but also approximately satisfies the known operator on a set of collocation points.
Why start here in the pipeline
This opening chapter trains intuition for residuals, boundary consistency, and comparability before any discussion of qubits. Those habits carry directly into variational quantum models, where the classical outer loop also minimises a surrogate energy or loss.
The Challenge
Two ansätze, one residual budget
The Challenge
Hypothesis class versus engineering cost
Replacing a classical MLP block with a quantum-inspired or quantum parameterised map can change which functions are easy to represent. It also changes optimisation noise, wall-clock time, and the burden on reviewers who must understand failure modes.
The defensible comparison holds the physics task fixed: same ODE, same boundary specification, same collocation schedule, same reported norm of the residual.
Reviewers should insist on
The Solution
One loss, two model families
The Solution
Residual-first formulation
Let \(u_\theta(t)\) be the scalar network output. A damped harmonic template uses \(r(t)=\ddot u + \omega^2 u\). Collocation points sample \(t\) inside the domain; the PINN penalty is a mean squared residual plus boundary terms.
The companion workshop compares a purely classical PINN with a variant that routes part of the representational capacity through a small quantum circuit while keeping the same residual and boundary functional. Any claimed benefit must surface in that shared metric, not in auxiliary plots alone.
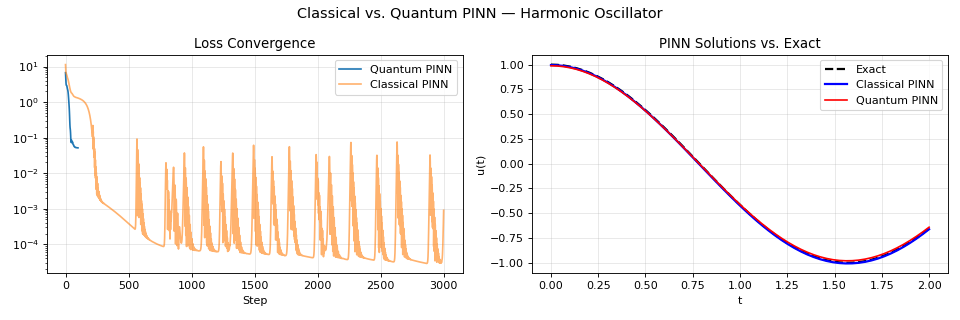
How to read the evidence plot
The companion figure compares training losses on the same task. Treat the vertical axis as a diagnostic: large drops early often reflect boundary correction, whereas the tail shows whether the residual continues to tighten or stalls because the ansatz cannot resolve high-frequency content.
Implementation
Finite-difference residual in time
Implementation
The discrete form below uses three time levels, explicit finite difference for \(\ddot u\), then a mean squared residual accumulated over the batch.
Swap in your boundary sampler and weight λ_bc; keep autograd enabled for θ.
import torch
def pinn_time_residual(model, t, dt, omega):
u_prev = model(t - dt)
u = model(t)
u_next = model(t + dt)
d2u = (u_next - 2.0 * u + u_prev) / (dt * dt)
return d2u + (omega ** 2) * u
def pinn_loss(model, t_interior, dt, omega, t_bc, u_bc):
r = pinn_time_residual(model, t_interior, dt, omega)
loss_phys = torch.mean(r ** 2)
u_hat = model(t_bc)
loss_bc = torch.mean((u_hat - u_bc) ** 2)
return loss_phys + lambda_bc * loss_bcLog both loss_phys and loss_bc separately so reviewers can see which term dominates.
import torch
for t_colloc, t_bc, u_bc in batches:
optim.zero_grad()
loss = pinn_loss(model, t_colloc, dt, omega, t_bc, u_bc)
loss.backward()
optim.step()Summary
Residual honesty before hardware claims
Summary
Recorded run (illustrative)
In one logged training trace for the quantum-style variant, the total objective moved through roughly 6.73 → 1.96 → 0.14 → 0.065 → 0.053. Treat these as optimisation checkpoints, not magic constants: the useful statement is whether the residual keeps decreasing while boundary error stays bounded.
Takeaway for the rest of the saga
If a later chapter introduces a variational circuit, insist on the same discipline: name the quantity you minimise, show how it connects to the business or scientific constraint, and keep a classical reference implementation on the identical data and grid.
Matched across classical and quantum-informed runs:
- The governing ODE and boundary data.
- The collocation grid and residual norm definition.
- The optimisation trace reporting format.
Continue this saga
Next chapter: Hard problems as bitstrings.